В Швейцарии построили робота-собаку, который продолжает бежать после выключения моторов
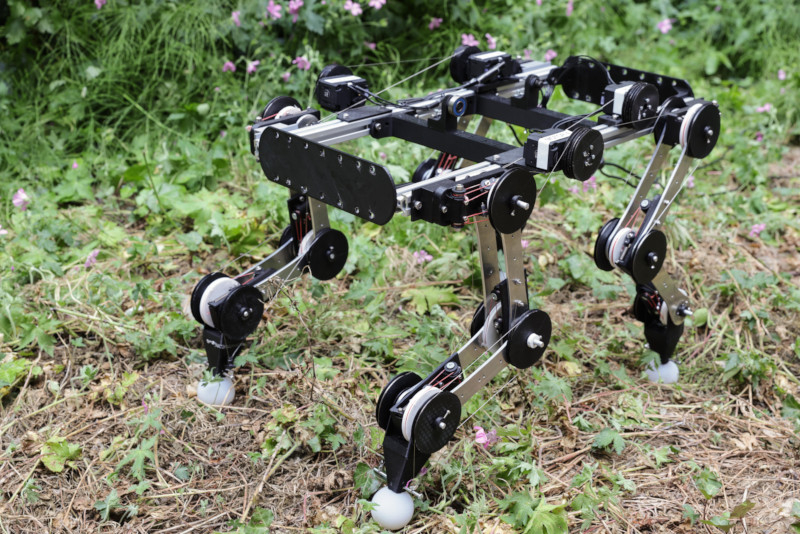
Похожие на собак роботы — это отдельное крупное направление в робототехнике, и инженерам Федеральной политехнической школы Лозанны (Швейцария) удалось сказать здесь новое слово. Построенный ими экспериментальный робот продолжает движение на беговой дорожке даже с отключёнными моторами — ему достаточно противовеса.
Автором проекта стал канадский студент-робототехник Микаэль Ашкар (Mickaël Achkar), а основой работы послужили данные, полученные в результате захвата движения реальных собак. При помощи метода главных компонент данные были сгруппированы в несколько векторов, описывающих основные оси движения собаки, и это послужило основой для проектирования механизма.
Конструкция робота симметрична относительно продольной оси. Кости конечностей ему заменили металлические стержни, суставы — напечатанные на 3D-принтере полимерные блоки, а сухожилия — тонкие стальные тросы. Каждая из четырёх ног машины имеет по три сустава, как у настоящей собаки, и каждый из них механически согласован с остальными.
При первом испытании машины участников проекта поджидал сюрприз: стоило только запустить приводы робота, как он продолжил движение самостоятельно, без поддержки со стороны двигателей, и единственным необходимым для поддержания движения компонентом стала работа беговой дорожки. Робот оборудован моторами, приводящими каждую ногу в движение, но эти моторы можно отключать.
«Сначала мы подумали, что это случайность. Поэтому мы немного изменили конструкцию и снова испытали робота — и больше работать он не смог», — рассказал автор проекта. Для того, чтобы аппарат смог продолжать движение, к его задней части прикрепили похожий на маятник противовес, призванный поддерживать бег. Это, конечно, не вечный двигатель: для прыжков и преодоления препятствий без приводов он обходиться не может.
«Наша цель не в том, чтобы состязаться с высокотехнологичными собакоподобными роботами, а скорее в том, чтобы исследовать основанные на биологических прототипах конструкции роботов. Это влечёт оттачивание фундаментального устройства робота и изменение его пассивных свойств таким образом, чтобы требовались лишь простые системы управления — и всё при максимальном расширении возможностей робота. То, что мы здесь проделали — проектировали суставы для согласованной работы — уже доказало свою полезность для создания роботизированных рук и других частей тела», — заключил Микаэль Ашкар.