В Японии создали недорогого одноногого робота, который способен удержаться на качающейся поверхности
Учёные Технологического института Toyota в Нагое (Япония) построили одноногого робота TTI Hopper, способного стоять, прыгать и удерживать равновесие на качающихся поверхностях. Машина построена из простейших недорогих компонентов общей стоимостью менее $1000. Ключевой особенностью разработки является уникальный алгоритм, который компенсирует ограниченные возможности робота.
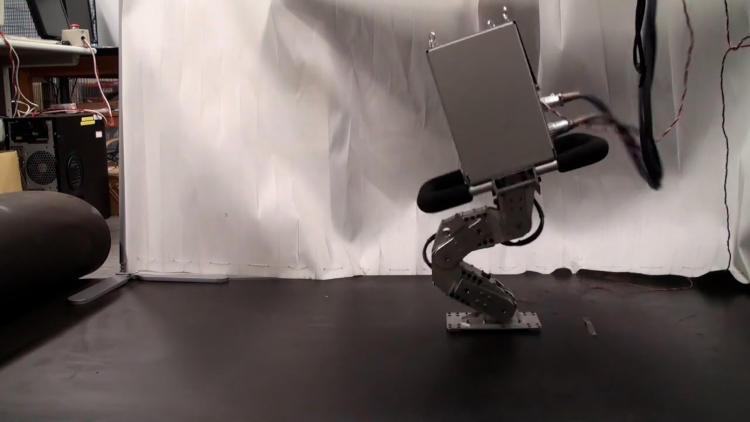
«В робототехнике мы часто используем гидравлические узлы, потому что они могут срабатывать быстро. Или электроприводы с особой пружинной системой либо тензометром для измерения внутренних сил. Вместо них мы использовали моторы постоянного тока с шестернями. Мы измеряем только угол на суставе, а также применили один недорогой датчик силы на ступне», — прокомментировал проект Баркан Угурлу (Barkan Uğurlu), сейчас он доцент Кафедры машиностроения в стамбульском Университете Озегин.
Алгоритм заставляет суставы сгибаться, когда возникает необходимость поглотить удар, и разгибает их, если нужно переместиться. Это позволяет машине сохранять вертикальное положение в сложных обстоятельствах, например, когда наклонная поверхность резко становится горизонтальной. Получившаяся «способность адаптироваться к ландшафту» не нова, уточнил господин Угурлу, но ему и коллегам удалось математически доказать, что их алгоритм гарантирует роботу равновесие при наклоне и движении в ходе экспериментов. Для этого они просчитали вертикальные и горизонтальные силы от моторов и гравитации, которые алгоритм производит в роботизированной ноге. Выяснилось, что TTI Hopper удерживает равновесие при наклоне поверхности до 9°.
Сейчас господин Угурлу на основе данного проекта разрабатывает двуногий экзоскелет для людей, чьи ноги оказались обездвиженными. «Коммерчески доступные экзоскелеты не обладают способностью самостоятельно балансировать. Они движут ноги, однако для равновесия необходимо задействовать верхнюю часть тела и костыли. Моя идея состоит в том, чтобы использовать способность адаптироваться к ландшафту и избавиться от костылей», — заключил учёный.